|
|
|
|
Surveys and methods
The principle aim of our study was to evaluate a fully three-dimensional implementation of the 'morphological method' (e.g., Carson and Griffiths, 1989, Ashmore and Church, 1998) for monitoring bed-material transport in large braided rivers over floods. Essentially, this requires surveying the riverbed topography at high spatial density before and after floods, mapping areas of erosion and deposition, and matching source areas of bed material load with downstream 'sinks'. We conducted four such surveys between February 1999 and May 2000, capturing the changes due to an 800 m3/s flood in March 1999 and a 970 m3/s flood in April 2000.
The first three surveys used digital photogrammetry to map the elevation of the dry areas of riverbed. The topography of the beds of the wetted channels was mapped with the aid of image-analysis techniques. This first involved fitting digital elevation models (DEMs) to the water surface topography using water-edge elevations extracted from the photogrammetric analysis. Then, water depth was classified from colour aerial photographs using empirically calibrated relationships between water depth and water colour. The wetted bed elevation was then obtained by subtracting the water depth map from the water surface map. This approach is detailed by Westaway et al. (this volume).
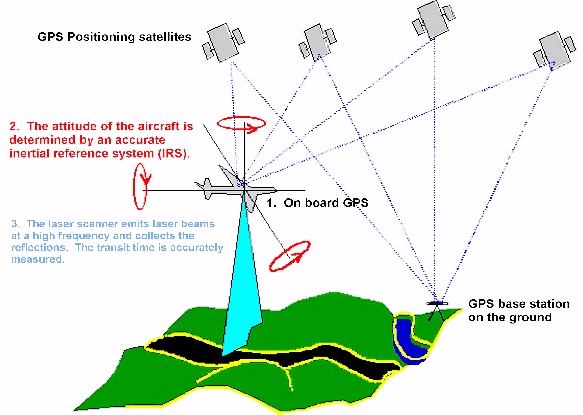
The fourth survey used a scanning airborne laser system (ALS) to survey the dry riverbed topography. This employs an aeroplane-mounted pulsing laser (1.04 micron wavelength) which scans across the flight path, sampling the ground elevation at a very high frequency (Figure 4). The study reach was scanned in three overlapping strips, with each strip scanned three times to increase the spatial density of the data. The location of the laser system in the air, with respect to the local circuit survey datum, was found by post-processed differential GPS. The GPS base station was operated in Christchurch, approximately 20 km distant from the study reach. Seven hundred check-points were surveyed on the ground and were used to calculate a local datum adjustment and to evaluate the accuracy of the ground elevation interpolated from the laser scanning. The standard error of the elevation checks was 16 cm. Proprietary software was used to filter out laser returns from riparian vegetation. In all, some 2 million points were scanned at an average horizontal spacing of 1.6 m. The wetted channel water depths were mapped from aerial photographs as previously, with water-edge laser measurements used to create elevation maps of the water surface.
Figure 4. The three fundamental components of an airborne laser system (ALS). First, the aircraft position is determined by a kinematic dual frequency GPS. Second, the aircraft's orientation or attitude is continually monitored by a sensitive Inertial Reference System (IRS). Third, the actual measurement device emits a laser beam with a high frequency and accurately measures the time taken for the beam to reflect from objects below it back to the aircraft. The laser beam is directed in a swathe across the ground by means of a rotating mirror. Post-processing software combines the scanner's position, the direction in which it is facing, and the distance measured to compile a digital elevation model (DEM). After Turton and Jonas (1999).
A fundamental assumption of the morphological method for measuring bed-material transport is that sources can be matched to sinks, with no through-put of sediment. To check this visually, we installed two video cameras 35 m above the riverbed on an electricity pylon. These are solar powered and video-linked to a computer located 4 km distant, and they allowed us to capture images of the river bed at 20 minute intervals during daylight hours. These images are also uploaded to a world-wide-web site at three hour intervals (http://www.niwa.cri.nz/cam-era/sites/waimaka/waimakariri-a.htm).
Analysis of erosion and deposition patterns between all four surveys is currently in progress. In this paper, we report on morphological features apparent from the latest, laser-based topographical mapping, and show a preview of how some of this topography develops using time-lapse sequences from the video cameras.